Coordinate Frames in Robotics
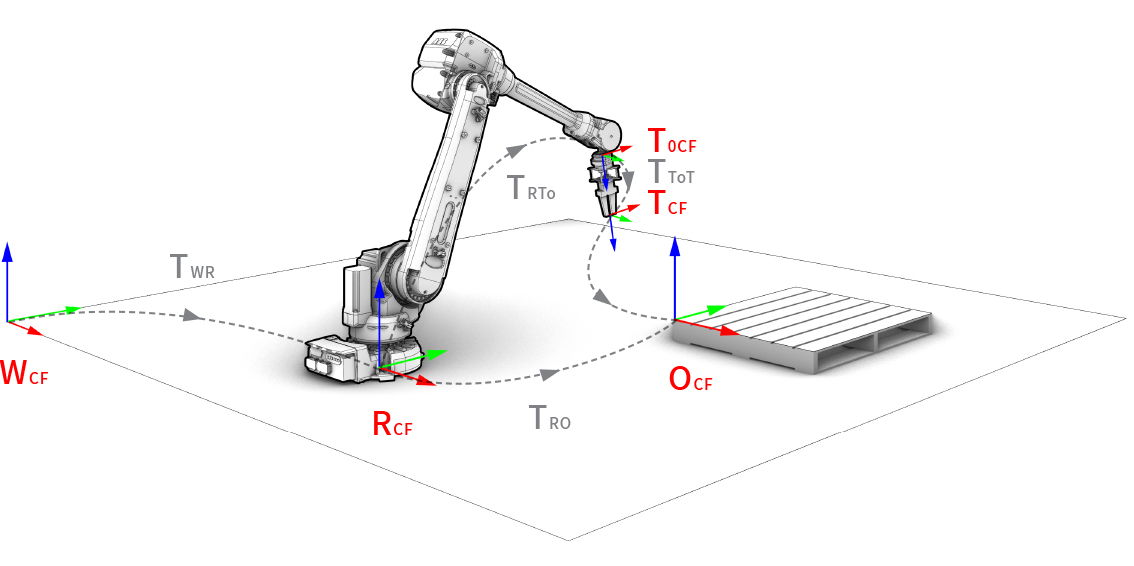
Each coordinate represents a point where square corners are detected on the checkerboard. The official ROS documents have an explanation of these coordinate frames but lets briefly define the main ones.
Compas Fab 1 2 Coordinate Frames
A frame is a defined coordinate system used as a matter of convenience when the straight lines of an external conveyor welding jig or perhaps a machine chuck dont line up with the robot base.

. This course follows the textbook Modern Robotics. A An ANYbotics ANYmal quadruped with relevant coordinate frames. As it was continuously recorded the frames are numered in ascending order.
This function can be seen in two different views. However choosing different conventions should be well justified and well documented. MODERN ROBOTICS MECHANICS PLANNING AND CONTROL Kevin M.
Joint offsets if defined are. B Factor graph. This is bleeding edge research software.
Base_footprint has its origin. Map frame has its origin at some arbitrarily chosen point in the world. Lynch and Frank C.
Each time you press COORD it will cycle through the available frames. The robots base or tool transform if present are incorporated into the result. The scope of potential robotics software is too broad to require all ROS software to follow the guidelines of this REP.
Finally a transformation matrix can be used to displace a point or a frame. Mechanics Planning and Control Lynch and Park Cambridge University Press 2017. Motion Generation for Robots and Machines.
CoppeliaSim User Manual Version 43. Allen School of Computer Science Engineering are engaged in ground-breaking work in mechanism design sensors computer vision robot learning Bayesian state estimation control theory numerical optimization biomechanics neural control of movement computational neuroscience brain-machine interfaces natural language. This drift makes the odom frame useless as a long-term global reference.
The plasmonic property of the nanorods makes them excellent. Paul USA May 2012. Consider the fact that any configuration can be achieved from the initial configuration by first rotating and then translating.
Science and Systems XVII year2021 About. In terms of coordinate frames and notation W denotes the OKVIS World frame z up. Robotics researchers at the Paul G.
The user manual is included in the downloadable CoppeliaSim packages. Stäubli Robotics is a leading international player in industrial automation providing engineering and technical support recognized for their efficiency and reliability. The pose of a mobile platform in the odom frame can drift over time without any bounds.
F represents the number of image frames. Here we develop a light-powered soft oscillator with adaptive oscillation modes in response to light irradiation of different intensities. All coordinate frames should follow these conventions.
Coord is used for quickly changing between available jogging coordinate systems. Each objectmodel can be individually controlled via an embedded script a plugin ROS ROS2 nodes remote API clients or a custom. Science and Systems 2013.
Old behaviour is to return a list of n frames 1 to n but if oldFalse it returns n1 frames 0 to n ie. You can purchase the book or use the free preprint pdf. The robotics simulator CoppeliaSim with integrated development environment is based on a distributed control architecture.
It includes the base frame. The Annual Review of Control Robotics and Autonomous Systems publishing in 2018 will provide comprehensive reviews of significant theoretical and applied developments that impact the engineering of autonomous and semiautonomous systems. However the pose of a robot in the odom frame is guaranteed to be continuous meaning that the pose of a mobile platform in the odom.
Type denotes the type of data. Trajectory Generation with Arbitrary Target States authorBerscheid Lars and Kroger Torsten journalRobotics. Automatic Camera and Range Sensor Calibration using a Single Shot International Conference on Robotics and Automation ICRA St.
This means they comply with the right. Tf2 is the second generation of the tf library and. There are three different frames available tool.
The ground truth annotations of the KITTI dataset has been provided in the camera coordinate frame left RGB camera but to visualize the results on the image plane or to train a LiDAR only 3D object detection model it is necessary to understand the different coordinate transformations that come into play when going from one sensor to. This is called the homogeneous coordinate representation of the 3-vector. Robotics development kit by.
Odom frame has its origin at the point where the robot is initializedThis coordinate frame is fixed in the world. This means that the result is the resulting pose when starting at the coordinate system of p_from and then in that coordinate system moving p_from_to. Park May 3 2017 This document is the preprint version of Modern Robotics Mechanics Planning and Control c Kevin M.
X denotes the number of frame. Note that the codebase that you are provided here is free of charge and without any warranty. Use the arrow keys to select which frame you wish to change then enter the number of the frame you wish to change to.
All systems are right handed. The number of points. Use technically advanced Stäubli solutions to coordinate your entire textile process with everything from a single source.
It features a hierarchical structure with the primary component being a photothermal actuator composed of a polymer hydrogel and Fe 3 O 4 Cu hybrid nanorods. Tf provided a system for representing tracking and transforming coordinate frames until ROS Hydro when it was deprecated in favor of tf2. KITTI GT Annotation Details.
Holding SHIFT and pressing COORD will let you select specific frame numbers. 3D joints positions in the real world coordinate frame Finally Y denotes the source camera. A custom featureframe The first argument p_from is used to transform the second argument p_from_to and the result is then returned.
The files are named X_type_Y. A color image of a hand. You will build on a library of robotics software in the language of your choice among Python Mathematica and MATLAB and use the free cross-platform.
Lynch and Frank C. Or when switching between different moving coordinate frames like picking from a conveyer belt. Park This preprint is being made available for personal use only and not for further distribution.
This coordinate frame is fixed in the world. The coordinate frame called odom is a world-fixed frame. In Proceedings of Robotics.
From weaving preparation frame and.
Welding Sensors Sensors Technology Sensor Time Complexity
Representing Robot Pose The Good The Bad And The Ugly Paul Furgale

Coordinate System Frames In Industrial Robots Patti Engineering
How To Describe The Rotation Of A Robot In 3d Automatic Addison
0 Response to "Coordinate Frames in Robotics"
Post a Comment